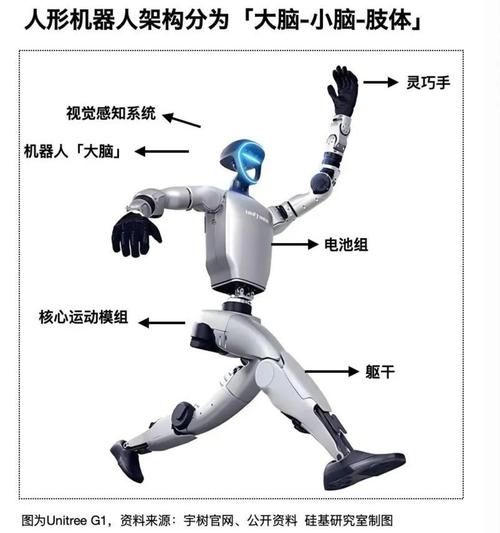
硬件系统 (机器人的“身体”)
硬件是机器人物理存在的基础,负责感知、行动和支撑,主要包括以下几个部分:
(图片来源网络,侵删)
机体结构
这是机器人的“骨架和外壳”,决定了机器人的物理形态、尺寸和稳定性。
- 材料:通常使用轻质高强度的材料,如铝合金、碳纤维、工程塑料等。
- 设计:根据应用场景设计,例如人形机器人、轮式机器人、足式机器人、无人机或机械臂,结构设计需要兼顾强度、重量、散热和美观。
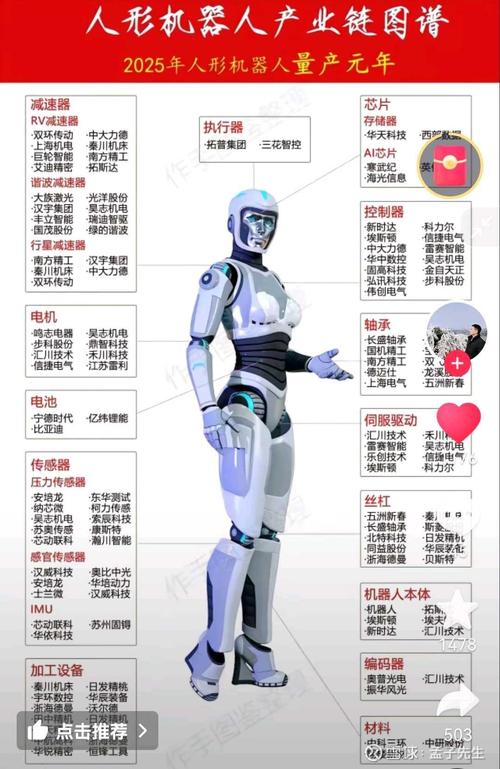
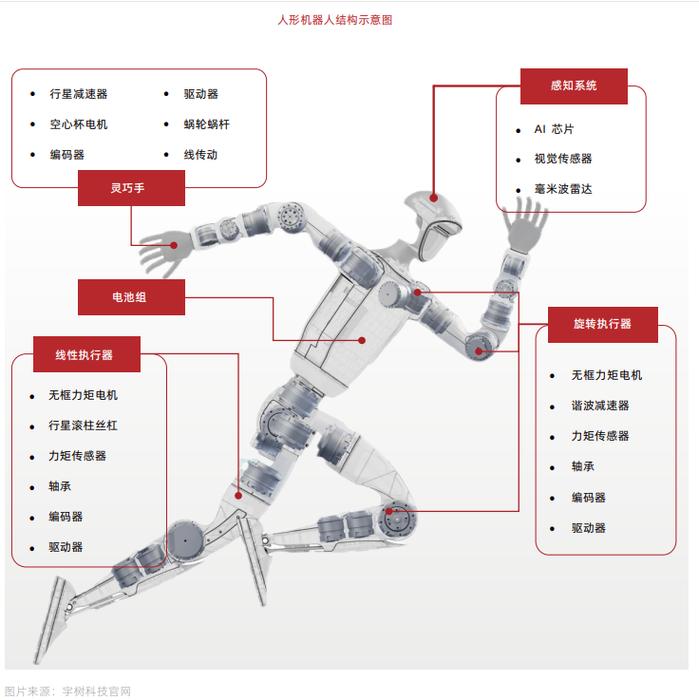
驱动系统
这是机器人的“肌肉”,负责驱动机器人运动或执行机构动作。
- 类型:
- 电机:最常用的驱动方式,包括直流电机、步进电机和伺服电机,伺服电机因其精确的控制能力,在关节和定位应用中非常普遍。
- 液压/气动驱动:通常用于需要巨大力量或特定环境的机器人,如工业重型机械臂、挖掘机器人或某些特种机器人。
传感系统
这是机器人的“五官”,让它能够感知外部环境和自身状态。
- 内部传感器 (感知自身):
- 位置/姿态传感器:如编码器、陀螺仪、加速度计、IMU(惯性测量单元),用于感知关节角度、自身姿态和速度。
- 力/力矩传感器:安装在关节或末端,用于感知接触力,实现柔顺控制。
- 外部传感器 (感知环境):
- 视觉传感器:摄像头(2D/3D),用于识别物体、场景、人脸、SLAM(即时定位与地图构建)等。
- 距离传感器:激光雷达、超声波传感器、红外传感器,用于测距、避障、环境建模。
- 其他传感器:麦克风(听觉)、温度/湿度传感器、触觉传感器等,用于获取更丰富的环境信息。
执行机构
这是机器人与外界交互的“手和脚”,完成具体的任务。
(图片来源网络,侵删)
- 末端执行器:安装在机器人手臂末端的工具,根据任务不同而变化,如夹爪、焊枪、螺丝刀、吸盘、笔等。
- 移动平台:机器人的“腿”,使其能够在环境中移动,如轮式底盘、履带式底盘、足式腿、螺旋桨(无人机)等。
电源系统
这是机器人的“心脏”,为其所有部件提供能量。
- 电池:最常用的电源,如锂离子电池、锂电池,需要考虑能量密度、续航能力和充电方式。
- 能源管理:包括电池管理系统、充电模块和电源转换模块,确保稳定、高效的供电。
软件系统 (机器人的“大脑与灵魂”)
软件是机器人的核心,它处理信息、做出决策并控制硬件执行动作,这是机器人“智能”的体现。
嵌入式系统与底层驱动
这是连接软件和硬件的“神经系统”,直接控制硬件。
- 嵌入式控制器:通常是高性能的微控制器或单板计算机,如STM32系列、Raspberry Pi、NVIDIA Jetson等,它们负责实时控制电机读取传感器数据。
- 底层驱动程序:为硬件(电机、传感器等)编写的底层代码,实现与硬件的直接通信和控制。
感知与处理算法
这是机器人“理解世界”的“视觉皮层”和“听觉皮层”。
(图片来源网络,侵删)
- 计算机视觉:图像处理、目标检测与识别、图像分割、三维重建(如使用深度相机)。
- 语音处理:语音识别、自然语言理解、语音合成。
- 传感器融合:将来自不同传感器的数据(如摄像头和激光雷达)进行融合,生成对环境更准确、更鲁棒的描述。
决策与规划系统
这是机器人“思考”的“大脑皮层”,负责制定行动计划。
- 定位与建图:SLAM技术,让机器人在未知环境中知道自己在哪,并绘制周围环境的地图。
- 路径规划:根据目标和地图,规划出一条从起点到终点的最优或可行的路径(如A、D等算法)。
- 任务规划:将一个大任务(如“把桌子上的杯子拿到厨房”)分解成一系列可执行的子步骤(“移动到桌子旁 -> 识别杯子 -> 张开夹爪 -> 抓取杯子 -> 移动到厨房 -> 放下杯子”)。
- 行为控制/运动规划:生成具体的关节运动轨迹或轮子转速,让机器人平稳、准确地执行动作。
人工智能与机器学习
这是机器人“学习和适应”的“智能核心”。
- 机器学习:通过数据训练模型,让机器人能够识别模式、进行预测和分类,通过大量图片训练,让机器人学会识别不同的物体。
- 深度学习:机器学习的一个分支,使用神经网络,在图像识别、自然语言处理等领域取得了巨大成功。
- 强化学习:让机器人通过与环境互动、试错来学习最优策略,例如学习如何走路、如何抓取形状不定的物体。
人机交互系统
这是机器人与人类沟通的“语言能力”。
- 交互界面:包括屏幕显示、语音对话、手势识别、App控制等。
- 对话系统:基于自然语言处理技术,实现与人类的流畅对话。
系统集成与通信
将上述所有硬件和软件模块有机地连接起来,形成一个协调工作的整体。
- 通信总线:如CAN总线、以太网、USB等,用于各个模块之间高速、可靠地传输数据。
- 实时操作系统:如ROS(Robot Operating System,机器人操作系统)、VxWorks等,提供任务调度、进程管理、设备驱动和通信机制,是机器人软件开发的“骨架”。
一个简单的比喻
- 硬件:就像一辆汽车的底盘、发动机、车轮、方向盘和摄像头。
- 软件:就像司机的大脑、眼睛、耳朵和决策能力。
- 感知算法 = 眼睛和耳朵,看到路、听到喇叭。
- 决策规划 = 大脑思考,判断是该加速、刹车还是转弯。
- 底层驱动 = 神经和肌肉,将大脑的指令传递给手脚去转动方向盘、踩刹车。
- AI/机器学习 = 司机的经验,通过开车越来越熟练,能应对复杂路况。
一个智能机器人是由精密的硬件身体和复杂的软件大脑共同构成的,硬件提供了感知和行动的能力,而软件(特别是AI算法)则赋予了它“智能”,使其能够理解环境、自主决策并完成复杂任务。


