Android智能小车终极指南:从零开始打造你的移动机器人帝国
文章描述: 想亲手打造一辆属于自己的Android智能小车?本文作为【高级机械维修】专家,为你提供从硬件选型、组装调试到软件编程、功能拓展的全流程保姆级教程,无论你是萌新还是发烧友,都能在这里找到答案,开启你的智能小车DIY之旅!
引言:为什么Android智能小车是DIY爱好者的新宠?
在人工智能与物联网浪潮席卷全球的今天,“Android智能小车”已不再是科幻电影里的道具,而是触手可及的DIY项目,它融合了机械工程、电子技术、计算机科学和人工智能,是一个绝佳的综合实践平台。
作为一名深耕机械维修与智能系统领域多年的专家,我见证过无数从零开始,最终成功让小车“活”起来的喜悦,这不仅仅是一个玩具,更是一个承载着创造、探索与学习精神的项目,它能让你直观地理解传感器如何感知世界,算法如何驱动决策,而Android系统又如何成为这一切的“智慧大脑”。
本文将为你拨开迷雾,提供一份详尽、专业、可操作的Android智能小车全攻略,助你攻克每一个技术难关,最终打造出属于你自己的移动机器人。
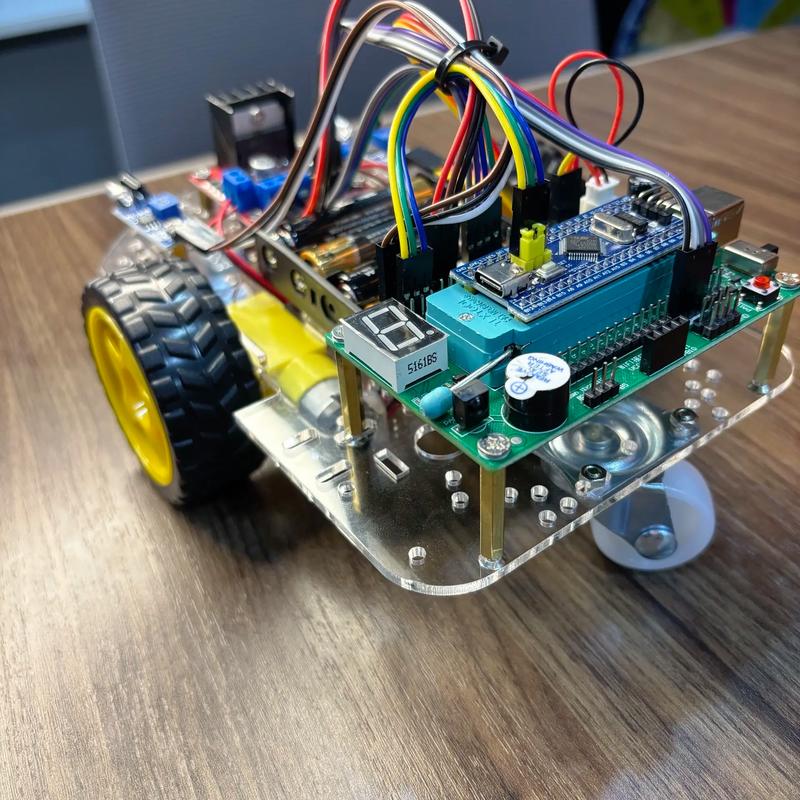
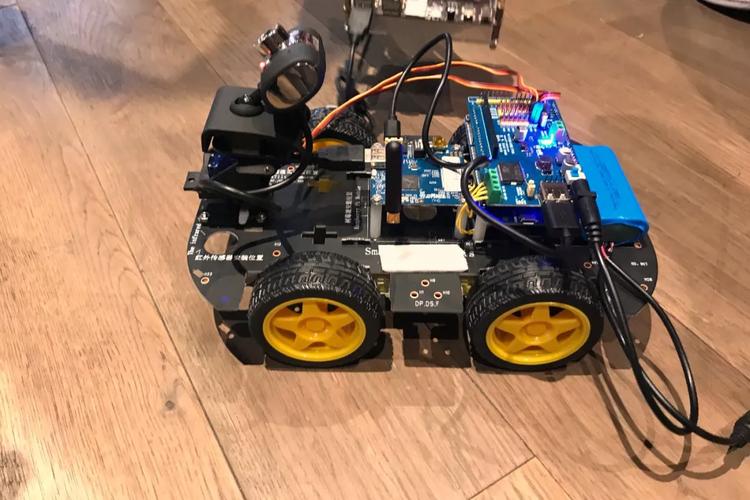
第一章:核心硬件解构——为你的智能小车打造钢铁之躯
一辆强大的智能小车,离不开坚实的硬件基础,作为【高级机械维修】专家,我强调“结构决定性能”,以下是构建Android智能小车的核心硬件清单及其选择要点:
底盘与驱动系统
- 材质选择: 亚克力(透明、易加工,适合初学者)、铝合金(坚固、轻便,专业首选)、碳纤维(极致轻量,成本高),对于大多数项目,2mm厚的铝合金底盘是性能与成本的最佳平衡点。
- 电机类型:
- 直流减速电机: 成本低,控制简单,通过PWM(脉冲宽度调制)信号调速,是入门级小车的首选。
- 步进电机: 精确控制转动角度,但扭矩较小,可能需要额外的驱动器。
- 舵机: 主要用于控制转向云台或机械臂,自带控制电路,易于使用。
- 电机驱动: 这是【高级机械维修】中的关键环节,单片机I/O口无法直接驱动电机,必须使用电机驱动模块,推荐 L298N(经典、可靠)或 TB6612FNG(效率更高、发热更小),务必注意驱动模块的电压和电流承受能力,匹配你的电机和电池。
控制核心——Arduino与树莓派的抉择
- Arduino (如Arduino UNO/Nano):
- 优点: 实时性强,适合处理对时间敏感的任务(如电机PID调速、传感器数据采集),社区庞大,教程丰富,编程简单(基于C++)。
- 角色: 通常作为“低层执行者”,负责直接与传感器、电机驱动等硬件交互,执行来自Android主控的指令。
- 树莓派 (如Raspberry Pi 4B):
- 优点: 性能强大,运行完整的Linux操作系统,可以直接运行Python、Java/C++等复杂程序,内置Wi-Fi和蓝牙,是连接Android设备、运行图像识别(如OpenCV)等高级功能的理想选择。
- 角色: 通常作为“智慧大脑”,负责处理高层逻辑、网络通信、图像分析和决策。
最佳实践(推荐方案): “Arduino + 树莓派” 双核心架构,树莓派通过USB串口或I2C总线与Arduino通信,将高层的运动指令(如“前进10cm”、“左转90度”)下发给Arduino执行,Arduino则负责精确控制电机转速和读取实时传感器数据,确保运动的稳定与精准,这种分工协作,实现了性能与复杂度的完美平衡。
传感器系统——赋予小车感知世界的能力
- 避障传感器:
- 超声波模块 (HC-SR04): 测距原理简单,成本低,是避障功能的标配。
- 红外避障传感器: 响应速度快,但易受环境光和颜色影响,适合短距离、高精度的避障。
- 循迹传感器:
- 红外对管循迹模块: 通过发射和接收红外线,检测地面黑白线,是实现循迹功能的核心。
- 环境感知传感器:
- 陀螺仪/加速度计 (MPU6050): 用于姿态解算,实现小车平衡(自平衡小车)或更精确的运动控制。
- 摄像头模块 (树莓派CSI摄像头): 结合OpenCV,可实现人脸识别、物体追踪、颜色识别等高级视觉功能。
- 电源管理:
- 电池: 推荐使用18650锂电池组(11.1V,容量2000mAh以上),能量密度高,务必配备保护板!
- 电压转换模块: 将电池的高电压(如11.1V)转换为系统所需的5V(给树莓派、Arduino)和3.3V(给部分传感器)。
第二章:软件与通信——让Android成为小车的超级遥控器
硬件是骨架,软件是灵魂,Android智能小车的魅力,很大程度上体现在其与手机App的交互上。
Android App开发:你的专属指挥中心
- 开发环境: Android Studio。
- 核心功能:
- 手动遥控: 设计一个简洁的UI,通过方向键、虚拟摇杆或触摸滑动,发送指令(如“前进”、“后退”、“左转”)给小车。
- 数据显示: 实时接收并显示来自小车的传感器数据(如速度、距离、电量)。
- 自动模式切换: 一键切换“手动模式”与“自动模式”(如循迹、避障)。
- 通信协议:
- 蓝牙 (Bluetooth Classic/BLE): 点对点连接,简单易用,适合短距离控制。(最常用)
- Wi-Fi: 覆盖范围广,可以实现基于网络的远程控制或视频流传输,但设置相对复杂。
- 实现方式: 在Android端使用Socket编程,在树莓派/Arduino端通过蓝牙模块(如HC-05)或Wi-Fi模块(如ESP8266)建立通信链路。
小车端软件编程:连接硬件与指令
- Arduino端:
- 编写代码,监听来自串口的指令。
- 解析指令,并调用相应的库函数(如
analogWrite()控制PWM调速,digitalWrite()控制方向)来驱动电机。 - 定期读取传感器数据,并通过串口回传给Android App。
- 树莓派端 (可选但推荐):
- 使用Python编写脚本,作为服务器端,接收来自Android App的指令。
- 根据指令,通过USB串口向Arduino发送具体的控制命令,或直接执行视觉识别等复杂任务。
第三章:从零开始——组装与调试全流程(实战演练)
【高级机械维修】专家提示:耐心和细致是成功的关键!
-
第一步:设计与规划
在纸上画出你的小车布局,确定各组件(底盘、电机、控制器、电池)的安装位置,注意重心和重量分布。
-
第二步:组装底盘
- 将电机固定在底盘上,安装车轮。
- 安装电机驱动模块,并用杜邦线连接电机和驱动模块的输出端。
- 将Arduino/树莓派固定在底盘上,确保稳固。
-
第三步:连接电路(分步进行,切勿短路!)
- 电源部分: 将电池连接到电源转换模块,再分别给驱动模块、控制器供电。强烈建议为每个部分加装独立的开关!
- 控制部分:
- Arduino -> 电机驱动:连接控制引脚(如IN1, IN2, ENA)。
- Arduino/树莓派 -> 传感器:按传感器手册连接VCC, GND, Signal引脚。
- Arduino/树莓派 -> 通信模块(蓝牙/Wi-Fi):连接TX, RX, VCC, GND(注意电平匹配)。
- 调试技巧: 每连接一个模块,都进行一次简单的通电测试,接好电机后,先通过简单的代码测试电机是否能正常正反转。
-
第四步:烧录与编程
- 先完成Arduino的基础代码,确保它能正确响应指令控制电机。
- 然后开发Android App,实现蓝牙连接和指令发送功能。
- 最后进行联调,确保App的指令能被小车正确执行。
-
第五步:功能拓展与优化
- PID算法: 为了让小车运动更平稳,速度更精确,可以尝试为电机控制引入PID(比例-积分-微分)算法,这是从“能用”到“好用”的飞跃。
- 自主导航: 结合SLAM(即时定位与地图构建)算法和激光雷达(如RPLIDAR A1),让你的小车实现自主建图和路径规划,这是迈向高级机器人的重要一步。
第四章:常见故障排查与解决方案
作为【高级机械维修】专家,我深知问题总会发生,以下是几个常见问题及其解决方法:
-
问题1:电机不转或抖动。
- 原因: 电源供电不足、电机驱动模块接线错误、使能引脚(ENA)未正确输入PWM信号、电机本身损坏。
- 解决: 用万用表测量驱动模块的供电电压;检查IN1/IN2/ENA的接线;用示波器或串口打印观察PWM信号是否正常;单独给电机通电测试。
-
问题2:蓝牙连接失败或断开。
- 原因: 配对码错误、蓝牙模块未进入AT模式(若需设置波特率)、距离过远、信号干扰。
- 解决: 确认配对码为“1234”或“0000”;检查波特率是否与代码中一致;缩短距离,避开其他无线设备。
-
问题3:小车运动不直,走“S”形。
- 原因: 两个电机的实际转速存在差异、地面摩擦力不均。
- 解决: 在代码中为两个电机设置不同的PWM值进行微调;检查车轮是否灵活转动,有无卡顿;确保地面平整。
开启你的智能小车DIY之旅
从一堆冰冷的零件,到一辆能听懂你指令、自主探索世界的智能小车,这个过程充满了挑战,更充满了乐趣,Android智能小车不仅是一个项目,更是一个平台,一个激发你无限创造力的起点。
希望这份由【高级机械维修】专家兼高级内容策划为你精心准备的指南,能为你铺平前行的道路,不要害怕失败,每一次调试都是一次学习,就动手去创造属于你的移动机器人帝国吧!如果你在实践过程中遇到任何问题,欢迎在评论区留言,我们一起探讨解决。


